
News
新闻动态

近日,电子与电气工程系副教授罗丹老师课题组在光控基于液晶弹性体的制动器领域取得研究新进展,成果以“Polarization dependent light-driven liquid crystal elastomer actuators based on photothermal effect”为题在国际著名学术期刊《Advanced Optical Materials》(IF=8.286)上发表。
由于软体制动器在仿生器件、人工肌肉、传感器和柔性机器人等领域的广泛应用,作为一种最具吸引力和激动性的软活动材料受到了广泛的关注。人们利用各种刺激(如温度、光、电场等)来实现软体制动器的变形或运动。其中,光响应性液晶弹性体(LCEs)由于其无需电池、电线和接触式驱动系统等优点,具有远程、即时、精确控制等优点而成为一种很有前途的材料体系。利用偶氮苯衍生物/单体掺杂聚合物,使用光化学效应进行可逆的反式光致异构化反应,是制备光响应性液晶弹性体的一种有效方法。另一种方法是在LCE材料中简单地掺杂光热剂。例如碳纳米管(CNTs)、金纳米棒(AuNR)、氧化石墨烯(GO)、有机染料、和聚多巴胺已被广泛用作太阳能采集装置的光响应驱动器的热源,振荡器,捕蝇器,毛毛虫,植物花等。
目前,已报道的基于光热效应的LCE驱动器主要利用光的波长或强度参数调制。在波长调制中,利用可见光驱动LCE驱动器实现了人工捕蝇器和毛毛虫驱动的微动机器人。掺杂红外吸收染料的近红外(NIR)光驱动LCE分别应用于具有径向/角向取向层和超快光响应速度的软体驱动器和振荡器。可见光和红外三波长调制驱动器也被报道为多向步行机器人。在基于强度的调制中,光驱动的软机器人通过在可见光和近红外光中扫描激光束来实现毛毛虫的运动。结构光驱动的仿生游泳运动和基于光热效应的光响应型软微型机器人的多功能运动已经被报道。然而,由于以前使用的光热剂的偏振吸收性能较差以及工艺制备不精密, 利用光偏振特性来驱动制动器一直没有实质性的进展,实现偏振光驱动的LCE制动器,这在基于光热效应的LCE制动器中仍然是一个挑战。缺乏光偏振调制将限制驱动器的形状变形模式,削弱光的操纵能力。因此,非常希望开发一种新的方法来制造LCE制动器,使得光的偏振可以用作调制参数。
在这里,我们展示了一种构建线偏振光驱动的LCE软体制动器的方法,它可以解决上述挑战。据我们所知,基于光热效应的偏振相关激光制动器首次被本文证实。这一方法是基于将二向色性染料(DD)掺杂到LCE中,其中DD的偏振吸收通过线偏振光的偏振方向来调制软体制动器。光的偏振作为一种光学参数,用来调谐振荡频率,而不是强度。制作了振荡器、仿生狗摆尾和光动风车三种偏振相关LCE制动器。实验证明,光的偏振对基于光热效应的光驱动动LCE制动器起到了控制参数的作用,并为光驱动的LCE制动器提供了除光的波长和强度之外的额外自由度。
本文第一作者李勇是南方科技大学访问学者,近几年累计在国际著名期刊发表论文10余篇。南方科技大学电子系罗丹副教授为文章的通讯作者。
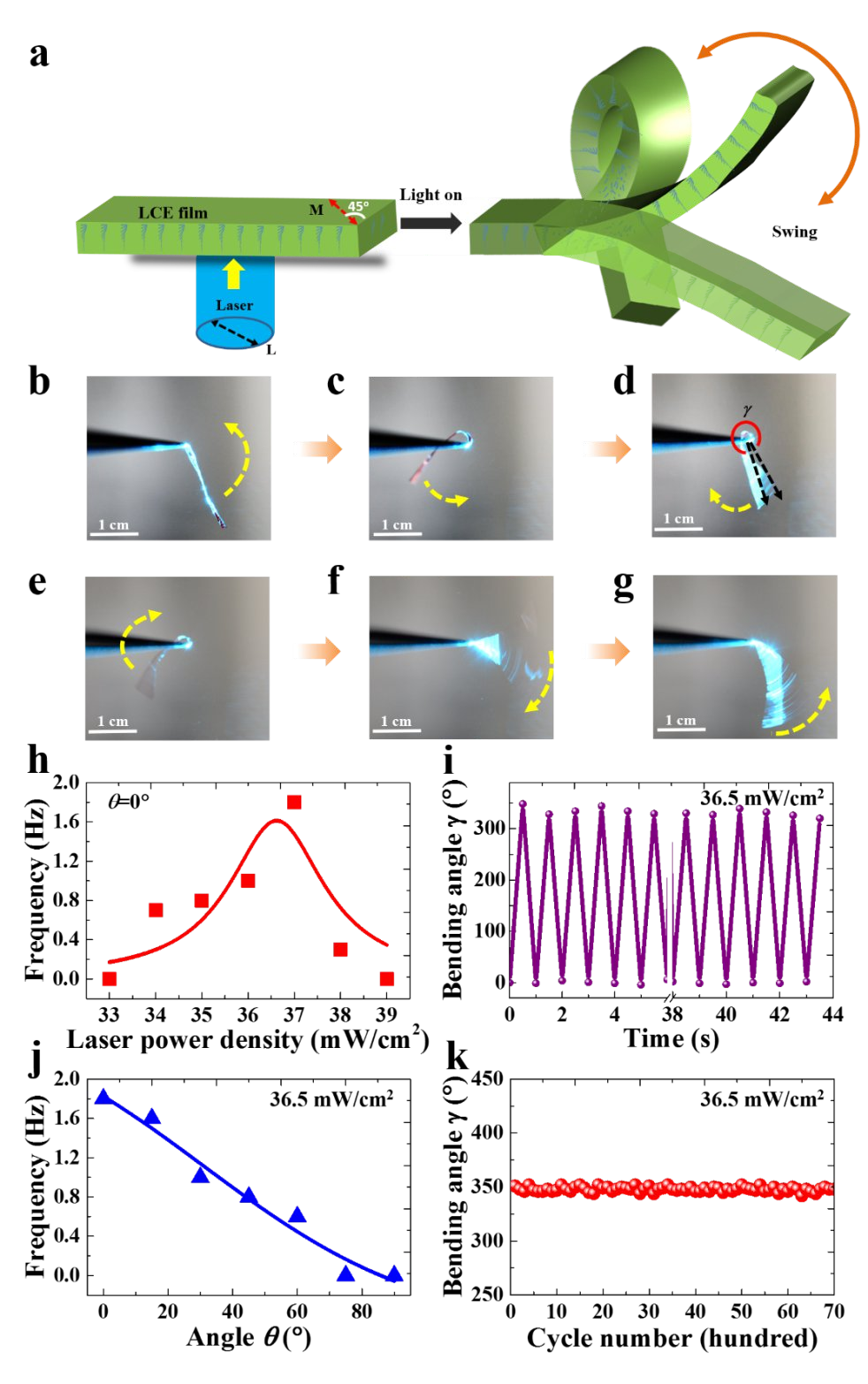
图1. (a)基于液晶弹性体的仿生摆尾动作,(b-g)摆尾动作分解,(h)摆尾频率与驱动光动率密度关系,(i)在一段时间内弯曲角交替变化,(j) 摆尾频率与不同驱动偏振光方向的关系,(k)7000次稳定性测试。
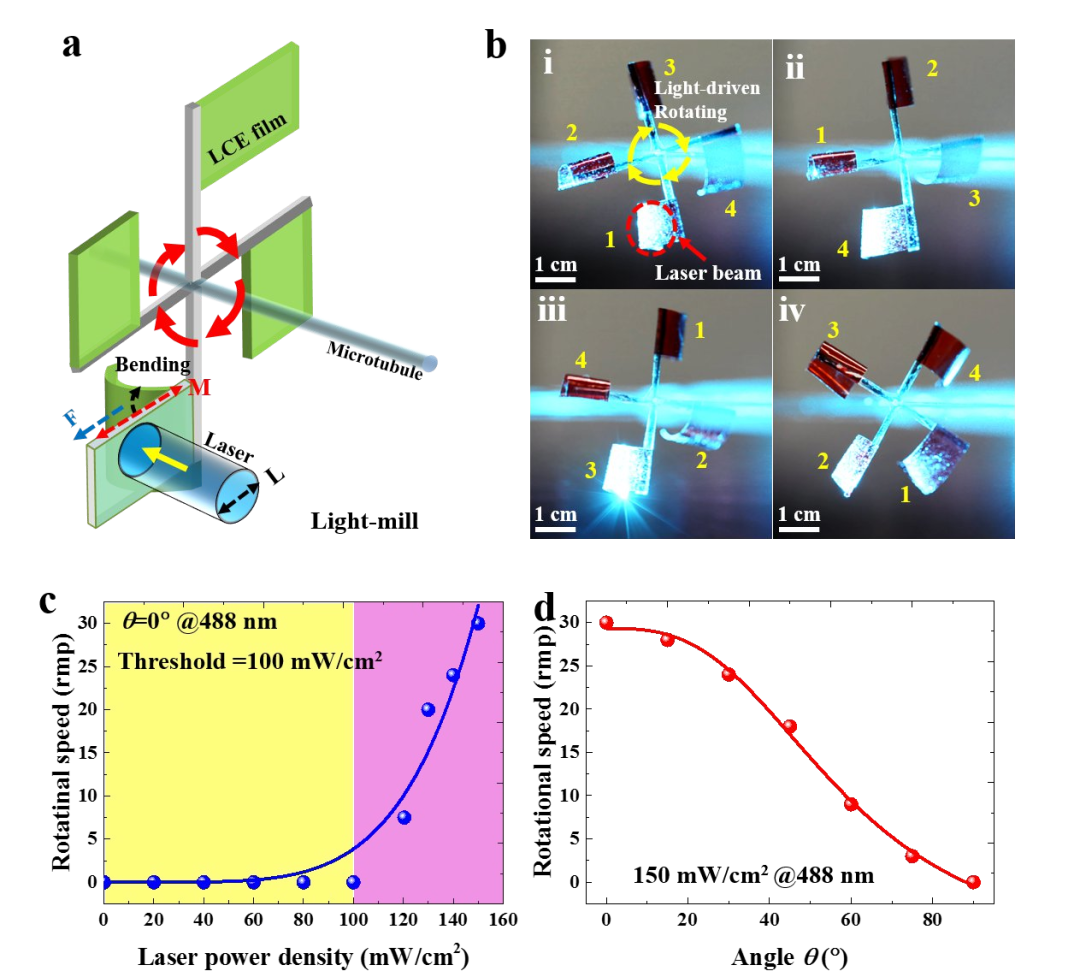
图2. 偏振光依赖LCE风车。(a)风车示意图,(b)风车旋转动作分解,(c)风车转速与驱动光源功率密度关系,(d)风车转速与不同驱动偏振光方向的关系。

